
Table of Contents
이전 글에서는 기본적인 신호에 대한 개념과 시스템의 개념을 살펴보았다. 오늘 정리할 것은 이산 신호에서 주기 신호와 비주기 신호를 더 자세히 알아보고, LTI 시스템이 무엇인지 그리고 시스템의 안정성을 판단하는 한 가지 방법을 보려고 한다.
Discrete periodic signals
신호는 시간 축의 성질에 따라 연속적인지 이산적인지 나누어볼 수 있었는데 이번에는 전체적으로 신호가 주기적으로 반복되는지 안되는지 나누어볼 것이다. 주기 신호는 같은 파형이 주기를 갖고 계속해서 반복되는 신호로 이산 시간 신호에서는 아래와 같이 정의한다:
\[x[n+N]=x[n]\]- $N$: 주기
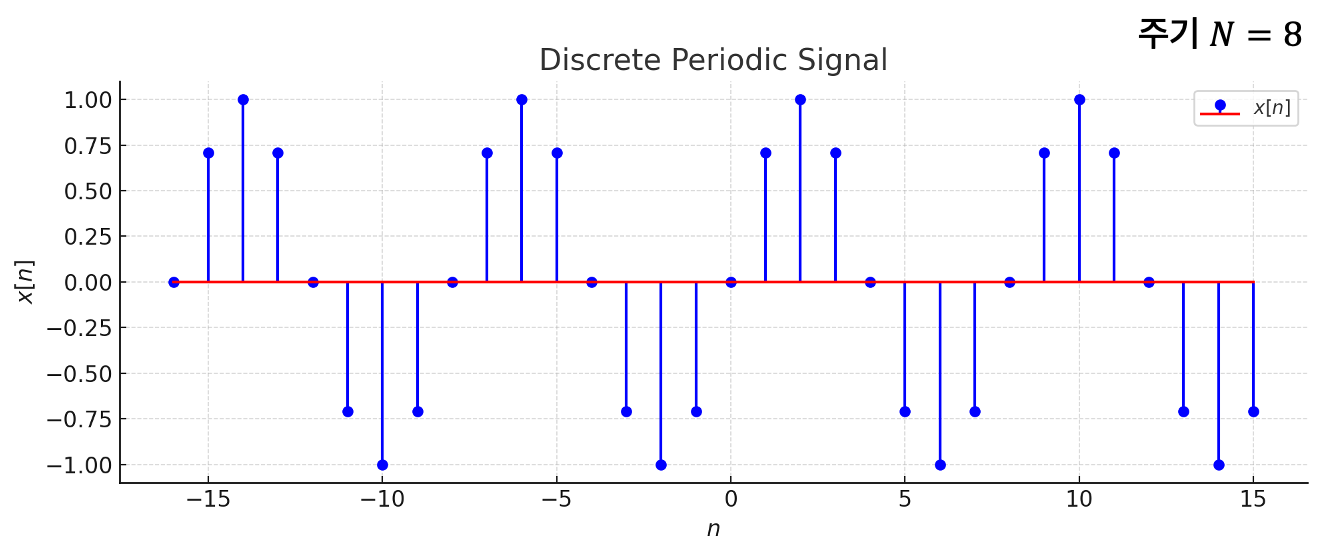 주기 $N=8$을 갖는 이산 주기 신호
주기 $N=8$을 갖는 이산 주기 신호
Basic discrete signals
Impulse signal
이산 임펄스 신호 $\delta[n]$은 극한 개념을 적용하여 정의하는 연속 임펄스 신호 $\delta(t)$와는 달리 물리적으로 존재하는 가장 단순한 신호이다. 이 신호는 이산 신호를 표현하는 데 있어 가장 기본이 되는 신호로서 사용되며, 이산 신호는 시간 이동된 임펄스 신호들의 가중합으로 나타낼 수 있다.
\[\delta[n]=\begin{cases} 1, & n = 0 \\ 0, & n \neq 0\end{cases} \qquad x[n] = \sum_{k=-\infty}^{\infty} x[k] \delta[n-k]\]Unit step signal
Unit step signal $u[n]$은 $n≥0$ 에서 항상 값이 1인 신호를 말한다. 이는 마치 $n=0$ 을 경계로 전류를 보내는 스위치 동작으로 이해할 수 있어 여러 종류의 신호를 표현하는데 사용된다. 또한, 단위 계단 신호를 사용한다면 $\delta[n]$은 $u[n]$의 차분으로 해석할 수 있고, $u[n]$은 $\delta[n]$의 이동합으로 표현할 수 있다.
\[u[n]=\begin{cases}1, & n \ge 0 \\ 0, & n < 0 \end{cases} \qquad \delta[n] = u[n]-u[n-1]\]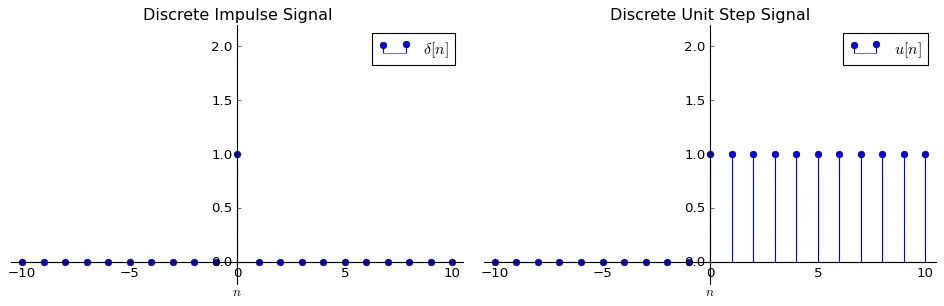
Discrete exponential signal
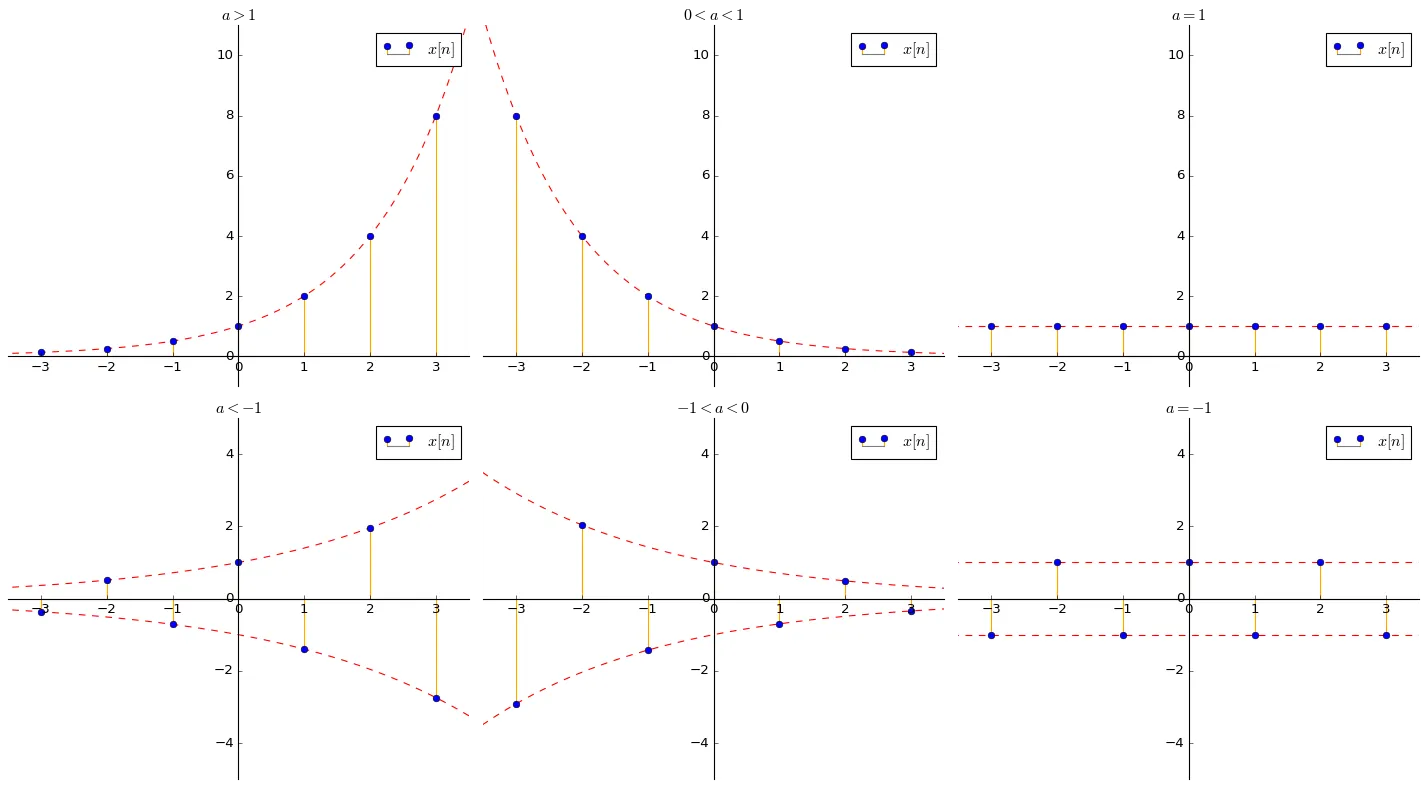
이산 지수 신호는 $a^n$ 꼴로 나타내는데, $a$값의 종류에 따라 실수 지수 신호와 복소 지수 신호로 나눌 수 있다.
\[x[n]=a^n\]- 이산 실수 지수 신호: $a$가 실수인 경우로서, $a$값에 따라 여러 종류의 형태의 그래프가 그려진다. $a$가 음수이면 음과 양의 값이 번갈아 가면서 진동하는 것처럼 나타난다. (그림 참고)
- 이산 복소 지수 신호: $a$가 복소수인 가장 일반적인 형태의 지수 신호로, 실수 지수 신호와 정현파 신호가 복합된 특성을 나타낸다. $x[n]=(re^{j\Omega_0})^n$
특히, $a$가 복소수인 경우 지수 신호 $x[n]$은 복소 정현파 신호가 된다. 오일러 공식에 의해 지수 신호는 2개의 정현파가 결합된 신호로 분리해서 볼 수 있다.
\[x[n]=e^{j\Omega_0 n}=\cos(\Omega_0n)+j\sin(\Omega_0n)\]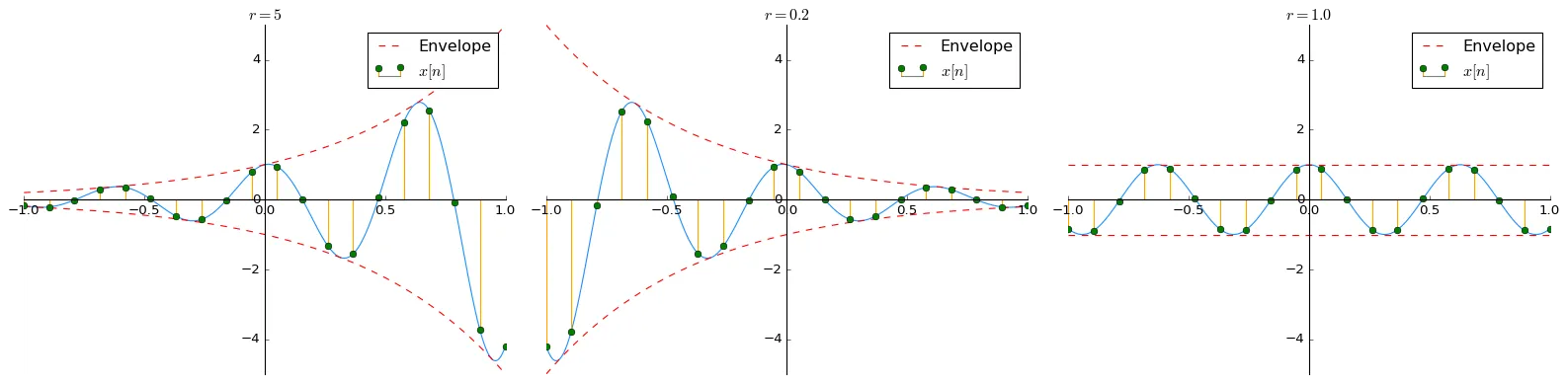
세 번째 그림은 정현파 신호를 적절히 샘플링하여 얻은 결과처럼 보일 수 있지만, 이산 시간 정현파가 항상 그렇게 해석되는 것은 아니다. 일반적으로 정현파 신호는 주기적인 특성을 가지며, 이러한 주기성을 만족하려면 다음의 조건이 필요하다.
이산 복소 정현파 신호가 주기성을 가지려면,
각주파수 $\Omega_0$를 $2\pi$로 나눈 값이 유리수여야 한다.
조금 더 깊게 생각해보면, 각주파수 $\Omega$가 $2\pi$의 정수 배만큼 차이 나는 이산 정현파들은 동일한 신호로 간주될 수 있다. 이는 오일러 공식을 통해 sinusoids가 $2\pi$를 배수로 하여 주기성을 갖는 특성을 지니기 때문이다. 따라서, 이산 정현파 신호는 주파수 구간 $0 \le \Omega_0 < 2\pi$ 내에서만 서로 구분될 수 있다.
Discrete system
시스템은 입력을 받아 출력을 생성하는 것을 목적으로 한다. 특정 시스템의 규칙은 수식으로 표현할 수 있으며, 특히 시간 영역이 이산적으로 주어진 시스템의 입출력 관계는 차분방정식으로 나타낸다:
\[y[n] + a_1 y[n-1] + \cdots + a_p y[n-p] = b_0 x[n] + \cdots + b_q x[n-q]\]이를 변형하면 다음과 같은 형태로 쓸 수 있다:
\[y[n] = -\sum_{k=1}^p a_k y[n-k] + \sum_{k=0}^q b_k x[n-k]\]- $a_k$: 과거 출력에 대한 가중치
- $b_k$: 입력 신호에 대한 가중치
처음 이 식을 접했을 때는, 시스템이 왜 이런 방식으로 표현되는지 이해하기 어려웠다. 그러나 이 식은 특정 시스템만을 표현하기 위한 것이 아니라, 모든 이산 신호 시스템을 공통적으로 나타내기 위한 일반적인 수식이다.
식에서 $b_k$가 계수로 사용되는 항은 현재 입력 신호를 처리하는 과정을 의미한다. 반면, $a_k$가 계수로 사용되는 항은 이전 출력 값을 이용해 현재 출력을 계산하는 과정을 나타낸다. 이를 통해 시스템이 입력과 과거 출력을 모두 활용하여 출력을 생성한다는 사실을 알 수 있다. (참고로, 두 항의 합 구간이 서로 다름에 주목하자.)
즉, 시스템의 출력은 현재 및 과거 입력과 출력 값의 조합으로 결정된다.
이를 ARMA(Auto-Regressive Moving Average) 모델이라고도 한다.
Classification of discrete system
Linear time-invariant system
신호를 구분했던 것 처럼, 시스템도 입력 신호의 종류에 따라 연속 시간 신호와 이산 시간 신호로 구분할 수 있다. 하지만 여기서 볼 것은 다른 관점으로 살펴볼 예정이다. 먼저 LTI 시스템은 선형성(linearity)와 시불변성(time-invariant)을 동시에 만족하는 시스템을 의미한다. 각 특징에 대한 설명을 살펴보자:
선형성이란, 시스템에 여러 신호가 동시에 입력될 때 출력이 각 신호를 따로 입력했을 때의 출력의 합과 동일해지는 가산성(additivity)과, 입력 신호의 크기를 배수로 늘리면 출력도 동일한 배수로 증가하는 동차성(homogeneity)을 모두 만족하는 성질을 말한다. 이 두 성질을 동시에 만족하는 것을 중첩의 원리(superposition property)라고 하며, 이는 다음과 같이 수식으로 표현된다:
\[H(x_1) = y_1, \quad H(x_2) = y_2 \quad \rightarrow \quad H(\alpha x_1 + \beta x_2) = \alpha y_1 + \beta y_2\]선형성을 갖는 시스템이 중요한 이유는 복잡한 신호도 단순한 신호들로 분해하여 분석할 수 있기 때문이다. 예를 들어, 이산 신호는 이산 임펄스 신호의 합으로 분리될 수 있는데, 선형성을 이용하면 각 임펄스 신호에 대한 응답을 개별적으로 계산하고 이를 합산하여 전체 응답을 구할 수 있다. 이러한 접근은 신호 해석을 훨씬 간단하게 만들어준다.
반면, 비선형 시스템에서는 이러한 분해와 분석이 불가능하다. 즉, 입력 신호의 개별적인 성질을 이용해 시스템 전체의 응답을 추론할 수 없으므로, 분석과 설계가 훨씬 더 어렵고 복잡해진다.
한편, 시불변 시스템은 입력을 넣어주는 시간에 상관없이 같은 입력에 대해 항상 같은 출력을 나타내는 시스템이다. 이는 입력 신호를 $n_0$만큼 지연해서 넣어주면 출력 신호도 $n_0$만큼 지연시켜서 나오는 시스템과 같다.
\[H\{x[n]\}=y[n] \quad \rightarrow \quad H\{x[n-n_0]\}=y[n-n_0]\]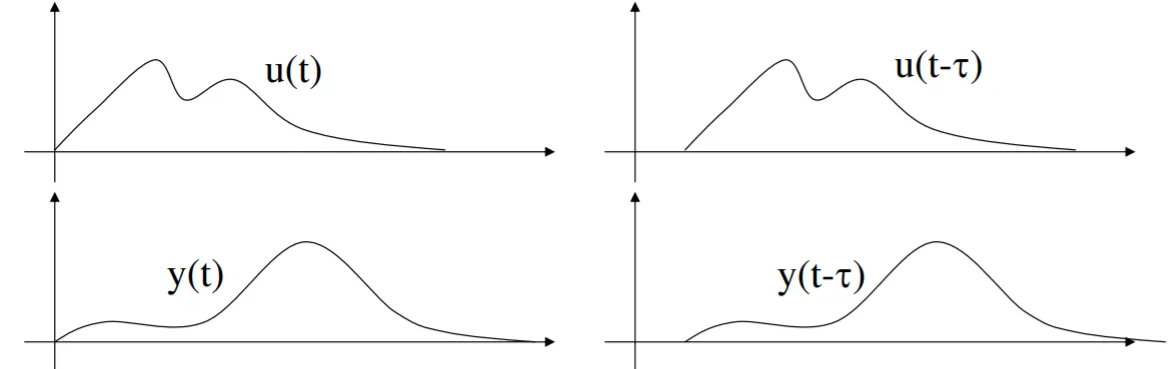 System Design for Uncertainty (Hover and Triantafyllou)
System Design for Uncertainty (Hover and Triantafyllou)
Causal system
실생활에서 물리적으로 현재의 어떤 영향이 과거에 영향을 미칠 수는 없지만, 그 영향은 미래까지 지속될 수 있다. 이러한 맥락에서 미래의 입력이 현재의 출력에 영향을 미치지 않는 성질을 인과성(causality)이라고 한다. 인과성을 갖는 시스템을 인과 시스템(causal system)이라 하며, 이러한 시스템은 입력이 발생하기 전에는 출력을 생성하지 않는다.
\[x[n]=0, \quad n\le n_0 \text{일 때,} \quad y[n]=0, \quad n \le n_0\]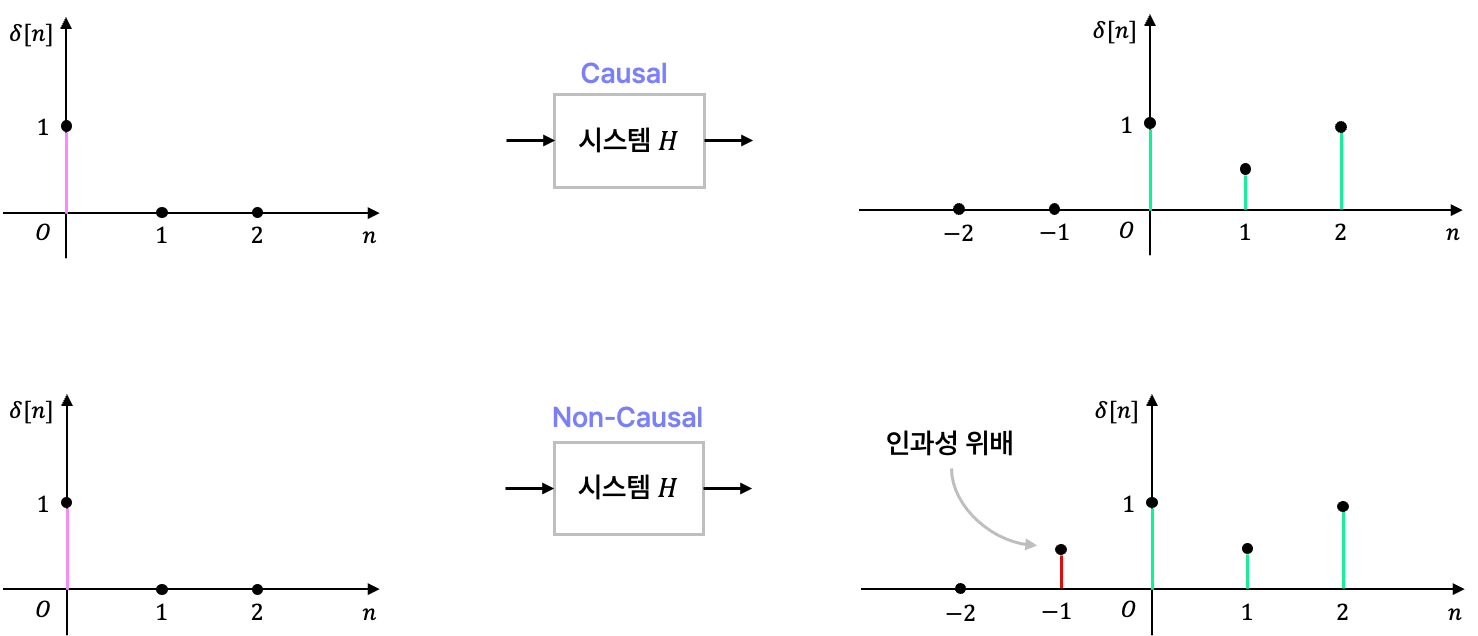
Stable system
시스템을 분류하는 또 다른 기준은 안정도이다. 그렇다면 시스템의 안정도는 어떻게 평가할 수 있을까? 안정도를 정의하는 방법에는 여러 가지가 있지만, 가장 널리 사용되는 것은 유한 입력 유한 출력 안정성(Bounded Input Bounded Output, BIBO 안정도)이다. BIBO 안정도는 말 그대로 입력이 유한하면 출력도 유한하다는 것을 의미한다. 여기서 ‘유한하다’는 것은 신호의 크기가 일정한 범위를 넘지 않는다는 뜻이다.
예를 들어, 어떤 시스템에 특정 크기 이하의 신호가 입력되었을 때, 출력 신호의 크기도 항상 일정한 한계 안에 머문다면, 이 시스템은 BIBO 안정도를 만족한다고 할 수 있다. 반대로, 입력이 유한함에도 출력이 무한히 커지거나 폭주한다면 그 시스템은 안정적이지 않은 것으로 판단된다.
\[|x[n]|\le M_x < \infty \; \text{일 때,} \quad |y[n]|\le M_y < \infty\]Summary
이번 글에서는 이산 신호의 주기성과 대표적인 신호들인 임펄스 신호, 계단 신호, 그리고 지수 신호를 중심으로 다루었다. 특히, 지수 신호가 복소수일 때 오일러 공식을 통해 정현파로 표현된다는 점과 이산 신호의 주파수 및 주기성 조건을 이해하는 것이 중요한 포인트였다.
또한, LTI 시스템의 개념과 임펄스 응답을 활용한 시스템 분석 방법을 살펴보며, 선형성과 시불변성, 그리고 BIBO 안정성을 통한 시스템 평가 기준도 정리하였다.
이산 신호와 시스템은 단순해 보이지만, 실제로는 신호 처리의 기초를 이루는 중요한 개념이다. 이번 기회에 기본 개념들을 다시 정리하며, 앞으로 심화 학습에서 이를 기반으로 더욱 복잡한 주제를 이해하는 데 활용할 수 있을 것 같다.


{kind=link}
Start the conversation